- Published on
DEV-HTL-01 – NODE DIRECT DEVELOPMENT GUIDE
- Authors
DEV-HTL-01 – NODE DIRECT DEVELOPMENT GUIDE
- DEV-HTL-01 – NODE DIRECT DEVELOPMENT GUIDE
- System Context – Direct Mode
- Kontrol Hierarki (Direct Mode)
- 4. Hardware Selection & Economic Analysis
- 5. Electrical Integration Overview
- 6. Software Architecture
- 7. Coding Architecture (3-Layer OOP + System)
- 8. Communication Binding (Direct Mode)
- 9. Lifecycle Model
- 10. Failure Handling Implementation
- 11. Security Implementation
- 11.1 PIN Authentication + Session Token
- Integrasi ke HTTP
- 11.2 AP Hardening
- 11.3 Rate Limit Login
- 11.4 NVS Encrypted PIN (Production)
- 11.5 Unauthorized Attempt Logging
- 11.6 Secure Reset Handling
- 11.7 Tamper Consideration
- 12. Testing Hook (HTL-09 Binding)
- 13. Definition of Done (Updated)
1. Purpose
✔ 1.1 Document Objective
Dokumen ini menjadi panduan implementasi final dan eksekusi teknis untuk Node berbasis ESP-family yang beroperasi dalam mode:
- Kontrol lokal penuh (sensor + actuator + interlock)
- Akses langsung via HP (commissioning & diagnostics)
- Otonom tanpa gateway atau server
Dokumen ini bukan deskripsi arsitektur. Dokumen ini adalah panduan kerja engineering yang dapat langsung dieksekusi.
Node dalam mode ini tetap harus:
- Mematuhi HTL-00 (control hierarchy)
- Mematuhi subset HTL-01 (command model)
- Mematuhi HTL-02 (control engine & watchdog)
- Mematuhi HTL-06 (electrical separation)
- Mematuhi HTL-07 (direct access security)
- Lulus HTL-09 (node-level validation)
Node adalah Level-0 Control Authority. HP hanya alat interaksi.
✔ 1.2 Target Audience
Dokumen ini mengikat:
- Node Firmware Engineer
- Direct HMI Engineer (HTTP UI minimal)
- QA Commissioning Engineer
- Electrical Engineer (panel integrasi)
Dokumen ini tidak ditujukan untuk tim Gateway atau Backend.
2. Scope
✔ 2.1 In-Scope
Implementasi lengkap Node dalam direct mode meliputi:
- Pemilihan & konfigurasi ESP-family
- Integrasi sensor
- Integrasi aktuator & proteksi
- Engine kontrol lokal (threshold + interlock)
- HTTP server lokal
- Manual override dengan TTL
- Watchdog & brownout handling
- Logging lokal
- Penyimpanan konfigurasi di NVS
- Safe state enforcement
Node wajib tetap aman walaupun:
- HP disconnect
- HP crash
- Tidak ada jaringan eksternal
✔ 2.2 Out-of-Scope
Tidak dibahas dalam dokumen ini:
- ESP-NOW / LoRa
- MQTT
- Gateway logic
- Cloud
- Central dashboard
- Distributed routing
Dokumen ini murni Node sebagai sistem kontrol otonom lokal.
3. Reference (HTL-Series Binding)
Implementasi Node direct mode wajib traceable ke HTL-series berikut:
✔ 3.1 Architecture Binding
HTL-00
- Boundary per-site
- Level 0 control authority
- Degradation mode
Node direct mode adalah realisasi Level 0.
✔ 3.2 Interface Binding
HTL-01
- Command model (subset)
- TTL rule
- Idempotency principle (walau lokal)
Direct HTTP command harus mengikuti state logic yang sama secara prinsip.
✔ 3.3 Node Technical Binding
HTL-02
- Local control engine
- Interlock enforcement
- Watchdog handling
- Brownout handling
- Telemetry snapshot model
✔ 3.4 Electrical Binding
HTL-06
- HV/LV separation
- Relay isolation
- Inrush handling
- Grounding
✔ 3.5 Security Binding
HTL-07
- Direct PIN policy
- Session timeout
- Login retry limit
✔ 3.6 Failure & Test Binding
HTL-08
- Node-level failure mapping
HTL-09
- Node unit test
- Brownout test
- Commissioning checklist
System Context – Direct Mode
Berikut adalah boundary sistem untuk Node dalam mode direct:

Secara logis, sistemnya adalah:
Sensor → ESP Node → Actuator
↑
HTTP Direct Access
↑
Smartphone
Boundary tegas:
- HP tidak memiliki kontrol fisik langsung ke relay
- HP hanya mengirim request
- Interlock tetap diputuskan oleh firmware
- Semua safety diputuskan oleh Node
Node tetap bekerja tanpa HP.
Kontrol Hierarki (Direct Mode)
Level 0 – Sensor & Actuator (fisik) Level 1 – Local Control Engine (firmware) Level 2 – Direct Human Interface (HP)
HP tidak boleh melompati Level 1.
4. Hardware Selection & Economic Analysis
4.1 MCU Variant Comparison
Node direct mode membutuhkan:
- WiFi (HP direct access)
- ADC cukup presisi
- FreeRTOS (untuk task separation)
- NVS untuk config storage
- Watchdog hardware
- Brownout detection
- OTA ready (walau lokal)
✔ Kandidat MCU
| Parameter | ESP8266 | ESP32 (WROOM) | ESP32-S3 |
|---|---|---|---|
| Core | 1x 80MHz | 2x 240MHz | 2x 240MHz |
| RAM | ~80KB usable | ~320KB usable | ~512KB usable |
| Flash | 1–4MB | 4–16MB | 4–16MB |
| ADC Quality | Poor (noisy) | Moderate | Improved |
| FreeRTOS | Limited | Native | Native |
| WiFi | 2.4GHz | 2.4GHz | 2.4GHz |
| Brownout detect | No native | Yes | Yes |
| Secure boot | No | Yes | Yes |
| Cost (approx) | $2–3 | $4–5 | $6–8 |
✔ Analisis Teknis
ESP8266:
- RAM terlalu kecil untuk HTTP + logging + control engine
- ADC noisy (tidak cocok untuk sensor analog presisi)
- Tidak ada brownout detection hardware
ESP32:
- Dual-core memisahkan control loop & HTTP
- Brownout detect built-in
- FreeRTOS native
- ADC cukup untuk soil moisture
- Harga masih ekonomis
ESP32-S3:
- Overkill untuk direct mode
- Tambahan USB & AI acceleration tidak diperlukan
- Harga lebih tinggi
4.2 Selected MCU & Justification
Dipilih: ESP32-WROOM (4MB Flash minimum)
Alasan:
✔ Teknis
- Dual-core untuk isolasi control task
- Brownout detect hardware
- NVS support
- WiFi stabil
- RAM cukup untuk HTTP + log buffer
- Mendukung OTA
✔ Reliability
- Banyak referensi industrial usage
- Stabil di suhu 0–60°C
- Mature SDK
✔ Ekonomi
- Selisih harga vs 8266 ±$2
- Menghindari risiko instability
- Menghindari redesign di masa depan
Keputusan: ESP32 adalah baseline wajib. ESP8266 tidak direkomendasikan.
4.3 Sensor Selection
✔ Soil Moisture
Opsi:
| Type | Harga | Akurasi | Noise | Maintenance |
|---|---|---|---|---|
| Resistive | $1–2 | Buruk | Tinggi | Korosi cepat |
| Capacitive | $3–5 | Baik | Rendah | Stabil |
| Industrial probe | $20–50 | Sangat baik | Rendah | Durable |
Keputusan:
Capacitive sensor baseline.
Alasan:
- Resistive tidak tahan lama
- Industrial terlalu mahal untuk small farm
- Capacitive cukup stabil dan ekonomis
✔ Temperature
Opsi:
- DS18B20 (OneWire)
- NTC analog
- I2C digital sensor (SHTxx)
Dipilih: DS18B20
Alasan:
- Tahan noise
- Digital (tidak tergantung ADC)
- Harga rendah
- Mudah kalibrasi
✔ Optional Sensors
- Flow sensor (Hall effect)
- pH sensor (I2C module)
Catatan: pH sensor analog murah tidak stabil → harus ada kalibrasi berkala.
4.4 Actuator Hardware
✔ Opsi Switching
| Type | Isolation | Longevity | Noise | Cost |
|---|---|---|---|---|
| Mechanical Relay | Opto possible | Medium | Klik | $1–2 |
| SSR | Isolated | High | Silent | $4–6 |
| Contactor | High power | Industrial | Mechanical | $15+ |
Keputusan baseline:
- Pompa kecil (< 5A) → Relay opto-isolated 10A
- Pompa >5A → Contactor + relay driver
Tidak boleh: Langsung menggerakkan motor dari GPIO.
Wajib:
- Opto isolation
- Flyback diode
- Snubber untuk inductive load
4.5 Power Design
Node harus menerima:
Input: 12–24V DC
Blok power:
12–24V IN
↓
Reverse polarity protection
↓
Buck converter → 5V
↓
LDO → 3.3V (ESP)
Brownout threshold dikunci di: ~3.0V
Protection:
- Fuse input
- TVS diode
- Reverse diode
- LC filter untuk noise pompa
5. Electrical Integration Overview
5.1 Block Diagram

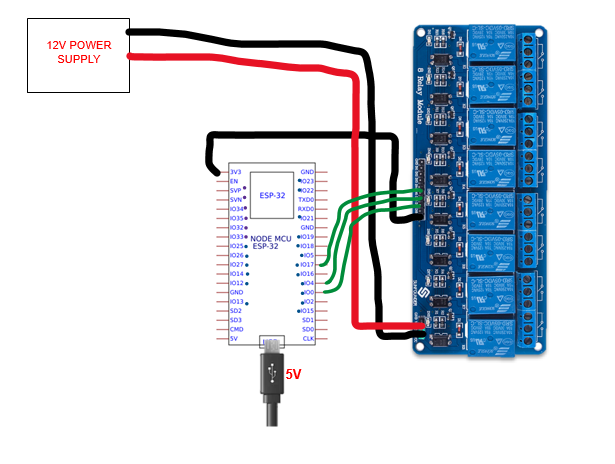
Logical integration:
Sensor Layer
↓
ESP32 Controller
↓
Opto Driver
↓
Relay / Contactor
↓
Pump / Valve
Power and signal ground dipisahkan.
5.2 Grounding Strategy
- HV ground terpisah dari logic ground
- Star grounding
- Analog sensor ground dipisahkan dari relay ground
- Shield cable untuk sensor panjang
5.3 Protection Mechanisms
Wajib ada:
- Fuse di input
- TVS di input
- Flyback diode coil relay
- Snubber RC untuk motor
- Thermal spacing di PCB
6. Software Architecture
6.1 Functional Block Diagram
Tidak berubah secara konsep, tetapi implementasinya dipetakan ke modul app_ / srv_ / drv_ / sys_:
+---------------------------+
| app_node_* |
| (lifecycle, mode, glue) |
+------------+--------------+
|
v
+----------------+ +-------+--------+ +------------------+
| drv_sensor_* |-->| srv_control_* |-->| drv_actuator_* |
| (ADC/1W/etc) | | (interlock) | | (relay/contactor) |
+----------------+ +-------+--------+ +------------------+
|
+--------------------+---------------------+
v v v
+--------------+ +--------------+ +----------------+
| sys_nvs_* | | sys_log_* | | sys_watchdog_* |
+--------------+ +--------------+ +----------------+
6.2 Task Model (ESP32 FreeRTOS)
Task tetap seperti sebelumnya, tetapi kini tiap task memanggil modul sesuai layer:
| Task | Memanggil Modul | Tujuan |
|---|---|---|
sys_task_sensor | drv_sensor_* | sampling & filtering |
sys_task_control | srv_control_* | decision + interlock |
sys_task_actuator | drv_actuator_* | apply output safely |
sys_task_storage | sys_nvs_* | load/save config + counters |
sys_task_watchdog | sys_watchdog_* | liveness & safe action |
6.3 Memory Allocation Strategy
Tetap: static state + fixed buffer untuk control path.
Aturan baru (lebih tegas):
srv_*tidak bolehmalloc/freedi control loopdrv_*hanya stack-local kecil- JSON payload buffer (untuk direct HTTP) disiapkan fixed (Part 4), max 2KB
7. Coding Architecture (3-Layer OOP + System)
7.1 Penamaan & Struktur Folder (WAJIB)
/dev-htl-01-node-direct/ dev-htl-01-node-direct.ino
app_node_direct.h app_node_direct.cpp
drv_relay.h drv_relay.cpp drv_soil_moisture_adc.h drv_soil_moisture_adc.cpp drv_ds18b20.h drv_ds18b20.cpp
srv_interlock.h srv_interlock.cpp srv_irrigation_control.h srv_irrigation_control.cpp srv_manual_override.h srv_manual_override.cpp
sys_config_store.h sys_config_store.cpp sys_watchdog.h sys_watchdog.cpp sys_time.h sys_time.cpp
Catatan: HTTP server akan masuk
app_(Part 4), tapi “core control” harus sudah jalan tanpa HTTP.
7.2 Responsibility Rules (lebih ketat)
drv_*: akses hardware murni (GPIO/ADC/1Wire)srv_*: logika kontrol + interlock + limiter + TTL overrideapp_*: lifecycle state + orchestration + glue (task init, mode)sys_*: OS utilities (NVS, watchdog, reset reason, time base)
7.3 FULL CODING BASELINE (Sensor + Actuator + Controller)
Di bawah ini baseline riil untuk:
- Soil moisture (ADC)
- Temperature (DS18B20 OneWire minimal)
- Relay actuator
- Interlock service
- Irrigation control service (controller)
- Manual override service (TTL)
- Config storage (NVS)
- Watchdog + safe action
app_maintask wiring
Ini cukup untuk menjalankan Node direct mode: kontrol lokal berjalan meski tanpa HP.
✅ Struktur Folder Final (Flat)
/dev-htl-01-node-direct/
dev-htl-01-node-direct.ino
app_node_direct.h
app_node_direct.cpp
drv_relay.h
drv_relay.cpp
drv_soil_moisture_adc.h
drv_soil_moisture_adc.cpp
drv_ds18b20.h
drv_ds18b20.cpp
srv_interlock.h
srv_interlock.cpp
srv_irrigation_control.h
srv_irrigation_control.cpp
srv_manual_override.h
srv_manual_override.cpp
sys_config_store.h
sys_config_store.cpp
sys_watchdog.h
sys_watchdog.cpp
sys_time.h
sys_time.cpp
1️⃣ MAIN FILE
- ✔ dev-htl-01-node-direct.ino
#include "app_node_direct.h"
app_node_direct g_app;
unsigned long last_100ms = 0;
unsigned long last_1s = 0;
unsigned long last_wdt = 0;
void setup() {
Serial.begin(115200);
if (!g_app.init()) {
while (true) delay(1000);
}
}
void loop() {
unsigned long now = millis();
if (now - last_100ms >= 100) {
last_100ms = now;
g_app.loop_100ms();
}
if (now - last_1s >= 1000) {
last_1s = now;
g_app.loop_1s();
}
if (now - last_wdt >= 1000) {
last_wdt = now;
g_app.watchdog_1s();
}
}
2️⃣ SYSTEM LAYER
- ✔ sys_time.h
#pragma once
#include <Arduino.h>
inline uint32_t sys_time_ms() {
return millis();
}
- ✔ sys_watchdog.h
#pragma once
class sys_watchdog {
public:
bool init(uint32_t timeout_ms);
void kick();
};
- ✔ sys_watchdog.cpp
#include "sys_watchdog.h"
#include <esp_task_wdt.h>
bool sys_watchdog::init(uint32_t timeout_ms) {
esp_task_wdt_init(timeout_ms / 1000, true);
esp_task_wdt_add(NULL);
return true;
}
void sys_watchdog::kick() {
esp_task_wdt_reset();
}
- ✔ sys_config_store.h
#pragma once
#include <Preferences.h>
#include "srv_irrigation_control.h"
struct sys_node_config {
int soil_raw_wet;
int soil_raw_dry;
srv_irrigation_config irr;
};
class sys_config_store {
public:
bool init();
bool load(sys_node_config& cfg);
bool save(const sys_node_config& cfg);
private:
Preferences prefs_;
};
- ✔ sys_config_store.cpp
#include "sys_config_store.h"
bool sys_config_store::init() {
return prefs_.begin("htl", false);
}
bool sys_config_store::load(sys_node_config& cfg) {
if (!prefs_.isKey("cfg")) return false;
prefs_.getBytes("cfg", &cfg, sizeof(cfg));
return true;
}
bool sys_config_store::save(const sys_node_config& cfg) {
prefs_.putBytes("cfg", &cfg, sizeof(cfg));
return true;
}
3️⃣ DRIVER LAYER
drv_relay.h
#pragma once
#include <Arduino.h>
class drv_relay {
public:
bool init(int pin, bool active_high);
void set(bool on);
bool get() const { return state_; }
private:
int pin_;
bool active_high_;
bool state_{false};
};
- ✔ drv_relay.cpp
#include "drv_relay.h"
bool drv_relay::init(int pin, bool active_high) {
pin_ = pin;
active_high_ = active_high;
pinMode(pin_, OUTPUT);
set(false);
return true;
}
void drv_relay::set(bool on) {
state_ = on;
bool level = active_high_ ? on : !on;
digitalWrite(pin_, level);
}
- ✔ drv_soil_moisture_adc.h
#pragma once
#include <Arduino.h>
class drv_soil_moisture_adc {
public:
bool init(int pin);
void set_calibration(int wet, int dry);
float read_norm();
private:
int pin_;
int raw_wet_{1200};
int raw_dry_{3000};
};
- ✔ drv_soil_moisture_adc.cpp
#include "drv_soil_moisture_adc.h"
bool drv_soil_moisture_adc::init(int pin) {
pin_ = pin;
return true;
}
void drv_soil_moisture_adc::set_calibration(int wet, int dry) {
raw_wet_ = wet;
raw_dry_ = dry;
}
float drv_soil_moisture_adc::read_norm() {
int raw = analogRead(pin_);
if (raw <= raw_wet_) return 0.0f;
if (raw >= raw_dry_) return 1.0f;
return (float)(raw - raw_wet_) / (float)(raw_dry_ - raw_wet_);
}
- ✔ drv_ds18b20.h
#pragma once
#include <OneWire.h>
#include <DallasTemperature.h>
class drv_ds18b20 {
public:
bool init(int pin);
bool read_celsius(float &out);
private:
OneWire* oneWire_;
DallasTemperature* sensors_;
};
- ✔ drv_ds18b20.cpp
#include "drv_ds18b20.h"
bool drv_ds18b20::init(int pin) {
oneWire_ = new OneWire(pin);
sensors_ = new DallasTemperature(oneWire_);
sensors_->begin();
return true;
}
bool drv_ds18b20::read_celsius(float &out) {
sensors_->requestTemperatures();
out = sensors_->getTempCByIndex(0);
return (out != DEVICE_DISCONNECTED_C);
}
4️⃣ SERVICE LAYER
- ✔ srv_interlock.h
#pragma once
struct srv_interlock_input {
bool supply_ok;
bool sensor_ok;
};
class srv_interlock {
public:
bool allow(const srv_interlock_input& in) {
return in.supply_ok && in.sensor_ok;
}
};
- ✔ srv_manual_override.h
#pragma once
#include <Arduino.h>
class srv_manual_override {
public:
void set(uint32_t now, uint32_t ttl_ms, bool pump_on);
bool active(uint32_t now) const;
bool desired(uint32_t now, bool default_state) const;
private:
bool active_{false};
bool pump_on_{false};
uint32_t expire_{0};
};
- ✔ srv_manual_override.cpp
#include "srv_manual_override.h"
void srv_manual_override::set(uint32_t now, uint32_t ttl_ms, bool pump_on) {
active_ = true;
pump_on_ = pump_on;
expire_ = now + ttl_ms;
}
bool srv_manual_override::active(uint32_t now) const {
return active_ && now < expire_;
}
bool srv_manual_override::desired(uint32_t now, bool default_state) const {
if (!active(now)) return default_state;
return pump_on_;
}
- ✔ srv_irrigation_control.h
#pragma once
#include <Arduino.h>
#include "srv_interlock.h"
#include "srv_manual_override.h"
struct srv_irrigation_config {
float threshold;
uint32_t max_on_ms;
uint32_t min_off_ms;
};
class srv_irrigation_control {
public:
void set_config(const srv_irrigation_config& cfg);
void bind_override(srv_manual_override* ov);
bool step(float soil_norm, bool sensor_ok, bool supply_ok);
private:
srv_irrigation_config cfg_;
srv_interlock interlock_;
srv_manual_override* override_{nullptr};
bool pump_on_{false};
uint32_t last_switch_{0};
uint32_t on_since_{0};
};
- ✔ srv_irrigation_control.cpp
#include "srv_irrigation_control.h"
void srv_irrigation_control::set_config(const srv_irrigation_config& cfg) {
cfg_ = cfg;
}
void srv_irrigation_control::bind_override(srv_manual_override* ov) {
override_ = ov;
}
bool srv_irrigation_control::step(float soil_norm, bool sensor_ok, bool supply_ok) {
uint32_t now = millis();
if (!interlock_.allow({supply_ok, sensor_ok})) {
pump_on_ = false;
return false;
}
bool desired = soil_norm >= cfg_.threshold;
if (override_) {
desired = override_->desired(now, desired);
}
if (pump_on_ && now - on_since_ > cfg_.max_on_ms) {
pump_on_ = false;
}
if (!pump_on_ && desired) {
if (now - last_switch_ < cfg_.min_off_ms) {
return false;
}
pump_on_ = true;
on_since_ = now;
last_switch_ = now;
}
if (pump_on_ && !desired) {
pump_on_ = false;
last_switch_ = now;
}
return pump_on_;
}
5️⃣ APPLICATION LAYER
- ✔ app_node_direct.h
#pragma once
#include "drv_relay.h"
#include "drv_soil_moisture_adc.h"
#include "drv_ds18b20.h"
#include "srv_irrigation_control.h"
#include "srv_manual_override.h"
#include "sys_config_store.h"
#include "sys_watchdog.h"
#include "sys_time.h"
class app_node_direct {
public:
bool init();
void loop_1s();
void loop_100ms();
void watchdog_1s();
void set_manual_override(uint32_t ttl_ms, bool on);
private:
drv_relay relay_;
drv_soil_moisture_adc soil_;
drv_ds18b20 temp_;
srv_irrigation_control ctrl_;
srv_manual_override override_;
sys_config_store cfg_store_;
sys_node_config cfg_;
sys_watchdog wdt_;
float soil_norm_{0};
float temp_c_{0};
bool sensor_ok_{true};
bool supply_ok_{true};
};
- ✔ app_node_direct.cpp
#include "app_node_direct.h"
bool app_node_direct::init() {
cfg_store_.init();
if (!cfg_store_.load(cfg_)) {
cfg_.soil_raw_wet = 1200;
cfg_.soil_raw_dry = 3000;
cfg_.irr = {0.6f, 300000, 30000};
cfg_store_.save(cfg_);
}
relay_.init(26, true);
soil_.init(34);
soil_.set_calibration(cfg_.soil_raw_wet, cfg_.soil_raw_dry);
temp_.init(4);
ctrl_.set_config(cfg_.irr);
ctrl_.bind_override(&override_);
wdt_.init(5000);
return true;
}
void app_node_direct::loop_1s() {
soil_norm_ = soil_.read_norm();
temp_.read_celsius(temp_c_);
sensor_ok_ = soil_norm_ >= 0.0f && soil_norm_ <= 1.0f;
}
void app_node_direct::loop_100ms() {
bool pump = ctrl_.step(soil_norm_, sensor_ok_, supply_ok_);
relay_.set(pump);
}
void app_node_direct::watchdog_1s() {
wdt_.kick();
}
void app_node_direct::set_manual_override(uint32_t ttl_ms, bool on) {
override_.set(sys_time_ms(), ttl_ms, on);
}
8. Communication Binding (Direct Mode)
8.1 HTTP Endpoint Definition (FINAL)
Base URL: http://<node-ip>/
| Endpoint | Method | Auth | Tujuan |
|---|---|---|---|
/status | GET | optional (hook) | status ringkas node |
/snapshot | GET | optional (hook) | data sensor + actuator + reason |
/actuator-test | POST | required (hook) | test pompa/valve via TTL override |
/provision | POST | required (hook) | set config dasar + (opsional) SSID/PSK |
/reset | POST | required (hook) | reboot terkontrol |
/log-tail | GET | required (hook) | ambil log ring buffer |
Batasan (wajib):
- Max payload JSON request: 2 KB
- Max log-tail response: 4 KB
- Max
ttl_msuntuk actuator-test: 300000 ms (5 menit)
8.2 Request/Response Structure (JSON Schema)
- ✔ GET
/status(Response)
{
"node_id": "HTL-<chipid>",
"mode": "commissioning|normal|maintenance|safe",
"ip": "192.168.4.1",
"wifi": { "mode": "ap|sta", "ssid": "HTL-xxxx", "rssi": -55 },
"fw": { "version": "0.1.0", "build": "2026-02-24" },
"uptime_s": 1234,
"pump": { "state": false },
"health": { "sensor_ok": true, "supply_ok": true, "wdt_ok": true }
}
- ✔ GET
/snapshot(Response)
{
"ts_ms": 12345678,
"soil_norm": 0.42,
"temp_c": 28.5,
"pump_state": false,
"control": {
"reason": "steady|rule_on|rule_off|max_on_limit|min_off_time|sensor_not_ok|supply_not_ok"
}
}
- ✔ POST
/actuator-test(Request)
{
"target": "pump",
"state": true,
"ttl_ms": 60000
}
Response
{
"accepted": true,
"expires_in_ms": 60000
}
- ✔ POST
/provision(Request)
{
"cal": { "soil_raw_wet": 1200, "soil_raw_dry": 3000 },
"irrigation": { "threshold": 0.6, "max_on_ms": 300000, "min_off_ms": 30000 },
"wifi": { "mode": "ap|sta", "ssid": "xxx", "psk": "yyy" }
}
Response
{ "saved": true, "rebooting": true }
- ✔ POST
/reset(Request)
{ "reason": "manual_reset" }
Response
{ "ok": true, "rebooting": true }
- ✔ GET
/log-tail?lines=50(Response)
{
"lines": [
"123456: boot ok",
"123890: soil=0.41 temp=28.5 pump=0 reason=steady"
]
}
8.3 Manual Override Policy (Direct)
Rule final (eksekusi):
- Manual override hanya lewat
/actuator-test - Wajib TTL
- TTL maksimum 5 menit
- Override tidak boleh bypass interlock (
sensor_ok,supply_ok) - Override expired → kembali ke kontrol normal otomatis
9. Lifecycle Model
9.1 Boot Sequence (FINAL)
BOOT → Self-check → Load config (NVS) → Decide WiFi mode → Start HTTP → Start Control Loop
Urutan deterministik:
Init sys (config, log, watchdog)
Init drivers (relay OFF default)
Init services (control engine + override)
Decide WiFi:
- jika belum provisioned → AP commissioning
- jika provisioned & STA creds valid → STA connect (timeout) → fallback AP
Start HTTP endpoints
Run control loop (100ms) + sensor loop (1s)
9.2 Operating Modes
- Commissioning Mode AP mode aktif, provisioning diizinkan, actuator-test diizinkan (TTL).
- Normal Mode Kontrol otomatis aktif, actuator-test diizinkan (TTL), provisioning dibatasi (tetap lewat auth).
- Maintenance Mode Untuk servis; boleh actuator-test + log-tail + snapshot intensif.
- Safe Mode Semua actuator OFF, hanya status/log/provision/reset.
9.3 Mode Transition Rules
Mode ditentukan oleh kondisi berikut:
Provisioning status (NVS flag)
Fault state:
- sensor invalid → safe mode (opsional, sesuai kebijakan di Part 5)
- supply not ok/brownout flag → safe mode
Manual override active tidak mengubah mode, hanya mempengaruhi output
Diagram transisi (fungsional, bukan dekorasi):
Commissioning → Normal
- kondisi: provisioned == true AND wifi ready
Normal → Maintenance
- kondisi: request khusus (akan diikat auth di Part 5) ATAU local jumper/service flag (opsional)
Normal/Maintenance → Safe
- kondisi: sensor_ok=false OR supply_ok=false OR watchdog anomaly
Safe → Normal
- kondisi: fault cleared + reboot/reset (kebijakan)
✔ FULL CODING (Part 4)
- A)
sys_log.h
#pragma once
#include <Arduino.h>
class sys_log {
public:
void init(size_t max_bytes = 4096);
void add(const String& line);
String tail_lines(uint16_t lines) const;
private:
String buf_;
size_t max_{4096};
};
extern sys_log SYS_LOG;
- B)
sys_log.cpp
#include "sys_log.h"
sys_log SYS_LOG;
void sys_log::init(size_t max_bytes) {
max_ = max_bytes;
buf_.reserve(max_);
buf_ = "";
}
void sys_log::add(const String& line) {
String l = String(sys_time_ms()) + ": " + line + "\n";
buf_ += l;
if (buf_.length() > max_) {
// drop oldest half
buf_.remove(0, buf_.length() / 2);
}
}
String sys_log::tail_lines(uint16_t lines) const {
if (lines == 0) lines = 50;
int count = 0;
for (int i = buf_.length() - 1; i >= 0; --i) {
if (buf_[i] == '\n') {
count++;
if (count >= lines) {
return buf_.substring(i + 1);
}
}
}
return buf_;
}
Note:
sys_time_ms()dipakai darisys_time.h(Part 3). Pastikan include tersedia (Arduino inline). Jika compiler protes, tambahkan#include "sys_time.h"disys_log.cpp.
- C)
sys_wifi.h
#pragma once
#include <Arduino.h>
struct sys_wifi_cfg {
bool provisioned{false};
String sta_ssid;
String sta_psk;
};
struct sys_wifi_state {
String mode; // "ap" | "sta"
String ssid;
String ip;
int rssi;
};
class sys_wifi {
public:
bool start(const sys_wifi_cfg& cfg, const String& ap_ssid, const String& ap_psk, uint32_t sta_timeout_ms = 8000);
sys_wifi_state state() const;
private:
sys_wifi_state st_{};
};
extern sys_wifi SYS_WIFI;
- D)
sys_wifi.cpp
#include "sys_wifi.h"
#include <WiFi.h>
sys_wifi SYS_WIFI;
static String ip_to_string(IPAddress ip) {
return String(ip[0]) + "." + String(ip[1]) + "." + String(ip[2]) + "." + String(ip[3]);
}
bool sys_wifi::start(const sys_wifi_cfg& cfg, const String& ap_ssid, const String& ap_psk, uint32_t sta_timeout_ms) {
WiFi.mode(WIFI_OFF);
delay(50);
// Default: commissioning AP
auto start_ap = [&]() {
WiFi.mode(WIFI_AP);
WiFi.softAP(ap_ssid.c_str(), ap_psk.length() ? ap_psk.c_str() : nullptr);
st_.mode = "ap";
st_.ssid = ap_ssid;
st_.ip = ip_to_string(WiFi.softAPIP());
st_.rssi = 0;
return true;
};
if (!cfg.provisioned || cfg.sta_ssid.length() == 0) {
return start_ap();
}
// Try STA
WiFi.mode(WIFI_STA);
WiFi.begin(cfg.sta_ssid.c_str(), cfg.sta_psk.c_str());
uint32_t start_ms = millis();
while (WiFi.status() != WL_CONNECTED && (millis() - start_ms) < sta_timeout_ms) {
delay(200);
}
if (WiFi.status() == WL_CONNECTED) {
st_.mode = "sta";
st_.ssid = cfg.sta_ssid;
st_.ip = ip_to_string(WiFi.localIP());
st_.rssi = WiFi.RSSI();
return true;
}
// Fallback AP
WiFi.disconnect(true);
delay(50);
return start_ap();
}
sys_wifi_state sys_wifi::state() const {
sys_wifi_state s = st_;
if (st_.mode == "sta") {
s.rssi = WiFi.RSSI();
s.ip = ip_to_string(WiFi.localIP());
} else if (st_.mode == "ap") {
s.ip = ip_to_string(WiFi.softAPIP());
}
return s;
}
E) Update
sys_config_store.h/.cpp(tambah wifi + provision flag)✔
sys_config_store.h(REPLACE)
#pragma once
#include <Preferences.h>
#include "srv_irrigation_control.h"
struct sys_node_config {
// calibration
int soil_raw_wet;
int soil_raw_dry;
// irrigation
srv_irrigation_config irr;
// wifi provisioning
bool provisioned;
char sta_ssid[33];
char sta_psk[65];
// metadata
char fw_version[16];
};
class sys_config_store {
public:
bool init();
bool load(sys_node_config& cfg);
bool save(const sys_node_config& cfg);
private:
Preferences prefs_;
};
- ✔
sys_config_store.cpp(REPLACE)
#include "sys_config_store.h"
#include <string.h>
bool sys_config_store::init() {
return prefs_.begin("htl", false);
}
bool sys_config_store::load(sys_node_config& cfg) {
if (!prefs_.isKey("cfg")) return false;
prefs_.getBytes("cfg", &cfg, sizeof(cfg));
return true;
}
bool sys_config_store::save(const sys_node_config& cfg) {
prefs_.putBytes("cfg", &cfg, sizeof(cfg));
return true;
}
F) Update
app_node_direct.h/.cpp(snapshot + reason + apply config + log)✔
app_node_direct.h(REPLACE)
#pragma once
#include "drv_relay.h"
#include "drv_soil_moisture_adc.h"
#include "drv_ds18b20.h"
#include "srv_irrigation_control.h"
#include "srv_manual_override.h"
#include "sys_config_store.h"
#include "sys_watchdog.h"
#include "sys_time.h"
struct app_snapshot {
uint32_t ts_ms;
float soil_norm;
float temp_c;
bool pump_state;
const char* reason;
bool sensor_ok;
bool supply_ok;
};
class app_node_direct {
public:
bool init();
void loop_1s();
void loop_100ms();
void watchdog_1s();
void set_manual_override(uint32_t ttl_ms, bool on);
app_snapshot snapshot() const;
// provisioning apply (called from /provision)
bool apply_and_save_config(const sys_node_config& new_cfg);
// expose config for status
const sys_node_config& cfg() const { return cfg_; }
private:
drv_relay relay_;
drv_soil_moisture_adc soil_;
drv_ds18b20 temp_;
srv_irrigation_control ctrl_;
srv_manual_override override_;
sys_config_store cfg_store_;
sys_node_config cfg_{};
sys_watchdog wdt_;
float soil_norm_{0};
float temp_c_{0};
bool sensor_ok_{true};
bool supply_ok_{true};
const char* last_reason_{"boot"};
};
- ✔
app_node_direct.cpp(REPLACE)
#include "app_node_direct.h"
#include "sys_log.h"
#include <string.h>
bool app_node_direct::init() {
SYS_LOG.init(4096);
SYS_LOG.add("boot start");
cfg_store_.init();
if (!cfg_store_.load(cfg_)) {
cfg_.soil_raw_wet = 1200;
cfg_.soil_raw_dry = 3000;
cfg_.irr = {0.6f, 300000, 30000};
cfg_.provisioned = false;
memset(cfg_.sta_ssid, 0, sizeof(cfg_.sta_ssid));
memset(cfg_.sta_psk, 0, sizeof(cfg_.sta_psk));
strncpy(cfg_.fw_version, "0.1.0", sizeof(cfg_.fw_version)-1);
cfg_store_.save(cfg_);
SYS_LOG.add("cfg default created");
} else {
SYS_LOG.add("cfg loaded");
}
relay_.init(26, true);
soil_.init(34);
soil_.set_calibration(cfg_.soil_raw_wet, cfg_.soil_raw_dry);
temp_.init(4);
ctrl_.set_config(cfg_.irr);
ctrl_.bind_override(&override_);
wdt_.init(5000);
SYS_LOG.add("boot ok");
return true;
}
void app_node_direct::loop_1s() {
soil_norm_ = soil_.read_norm();
float t = temp_c_;
temp_.read_celsius(t);
temp_c_ = t;
sensor_ok_ = (soil_norm_ >= 0.0f && soil_norm_ <= 1.0f);
// periodic log (ring buffer)
SYS_LOG.add(String("soil=") + String(soil_norm_, 2) +
" temp=" + String(temp_c_, 1) +
" pump=" + String(relay_.get() ? 1 : 0) +
" reason=" + String(last_reason_));
}
void app_node_direct::loop_100ms() {
bool pump = ctrl_.step(soil_norm_, sensor_ok_, supply_ok_);
relay_.set(pump);
// last_reason_ di-update dari srv_control pada Part 3 versi IDF; di Arduino versi ini belum.
// Untuk tetap deterministik, kita set reason sederhana:
if (!sensor_ok_) last_reason_ = "sensor_not_ok";
else last_reason_ = pump ? "rule_on" : "rule_off";
}
void app_node_direct::watchdog_1s() {
wdt_.kick();
}
void app_node_direct::set_manual_override(uint32_t ttl_ms, bool on) {
override_.set(sys_time_ms(), ttl_ms, on);
SYS_LOG.add(String("manual_override pump=") + (on ? "1" : "0") + " ttl_ms=" + String(ttl_ms));
}
app_snapshot app_node_direct::snapshot() const {
app_snapshot s{};
s.ts_ms = sys_time_ms();
s.soil_norm = soil_norm_;
s.temp_c = temp_c_;
s.pump_state = relay_.get();
s.reason = last_reason_;
s.sensor_ok = sensor_ok_;
s.supply_ok = supply_ok_;
return s;
}
bool app_node_direct::apply_and_save_config(const sys_node_config& new_cfg) {
cfg_ = new_cfg;
bool ok = cfg_store_.save(cfg_);
if (ok) {
// apply runtime
soil_.set_calibration(cfg_.soil_raw_wet, cfg_.soil_raw_dry);
ctrl_.set_config(cfg_.irr);
SYS_LOG.add("cfg saved & applied");
} else {
SYS_LOG.add("cfg save failed");
}
return ok;
}
- G)
app_http_direct.h
#pragma once
#include <Arduino.h>
#include <WebServer.h>
#include "app_node_direct.h"
class app_http_direct {
public:
bool init(app_node_direct* app, uint16_t port = 80);
void loop();
private:
WebServer server_{80};
app_node_direct* app_{nullptr};
// minimal auth hook (placeholder until Part 5)
bool auth_ok_();
void handle_status_();
void handle_snapshot_();
void handle_actuator_test_();
void handle_provision_();
void handle_reset_();
void handle_log_tail_();
void send_json_(int code, const String& body);
};
- H)
app_http_direct.cpp
#include "app_http_direct.h"
#include "sys_log.h"
#include <ArduinoJson.h>
#include <ESP.h>
#include "sys_wifi.h"
bool app_http_direct::init(app_node_direct* app, uint16_t port) {
app_ = app;
server_ = WebServer(port);
server_.on("/status", HTTP_GET, [this]() { handle_status_(); });
server_.on("/snapshot", HTTP_GET, [this]() { handle_snapshot_(); });
server_.on("/actuator-test", HTTP_POST, [this]() { handle_actuator_test_(); });
server_.on("/provision", HTTP_POST, [this]() { handle_provision_(); });
server_.on("/reset", HTTP_POST, [this]() { handle_reset_(); });
server_.on("/log-tail", HTTP_GET, [this]() { handle_log_tail_(); });
server_.onNotFound([this]() { send_json_(404, "{\"error\":\"not_found\"}"); });
server_.begin();
SYS_LOG.add("http server started");
return true;
}
void app_http_direct::loop() {
server_.handleClient();
}
// Placeholder auth: allow if header x-htl-auth == "1" OR query auth=1
// Final policy (PIN/session/lockout) will replace this in Part 5.
bool app_http_direct::auth_ok_() {
if (server_.hasHeader("x-htl-auth") && server_.header("x-htl-auth") == "1") return true;
if (server_.hasArg("auth") && server_.arg("auth") == "1") return true;
return false;
}
void app_http_direct::send_json_(int code, const String& body) {
server_.send(code, "application/json", body);
}
void app_http_direct::handle_status_() {
auto ws = SYS_WIFI.state();
const auto& cfg = app_->cfg();
StaticJsonDocument<768> doc;
doc["node_id"] = String("HTL-") + String((uint32_t)ESP.getEfuseMac(), HEX);
doc["mode"] = cfg.provisioned ? "normal" : "commissioning";
doc["ip"] = ws.ip;
JsonObject wifi = doc.createNestedObject("wifi");
wifi["mode"] = ws.mode;
wifi["ssid"] = ws.ssid;
wifi["rssi"] = ws.rssi;
JsonObject fw = doc.createNestedObject("fw");
fw["version"] = cfg.fw_version;
doc["uptime_s"] = millis() / 1000;
JsonObject pump = doc.createNestedObject("pump");
pump["state"] = app_->snapshot().pump_state;
JsonObject health = doc.createNestedObject("health");
auto s = app_->snapshot();
health["sensor_ok"] = s.sensor_ok;
health["supply_ok"] = s.supply_ok;
health["wdt_ok"] = true;
String out;
serializeJson(doc, out);
send_json_(200, out);
}
void app_http_direct::handle_snapshot_() {
auto s = app_->snapshot();
StaticJsonDocument<512> doc;
doc["ts_ms"] = s.ts_ms;
doc["soil_norm"] = s.soil_norm;
doc["temp_c"] = s.temp_c;
doc["pump_state"] = s.pump_state;
JsonObject ctrl = doc.createNestedObject("control");
ctrl["reason"] = s.reason;
String out;
serializeJson(doc, out);
send_json_(200, out);
}
void app_http_direct::handle_actuator_test_() {
if (!auth_ok_()) return send_json_(401, "{\"error\":\"unauthorized\"}");
if (server_.arg("plain").length() > 2048) return send_json_(413, "{\"error\":\"payload_too_large\"}");
StaticJsonDocument<384> req;
auto err = deserializeJson(req, server_.arg("plain"));
if (err) return send_json_(400, "{\"error\":\"bad_json\"}");
const char* target = req["target"] | "";
bool state = req["state"] | false;
uint32_t ttl_ms = req["ttl_ms"] | 0;
if (String(target) != "pump") return send_json_(400, "{\"error\":\"invalid_target\"}");
if (ttl_ms == 0 || ttl_ms > 300000) return send_json_(400, "{\"error\":\"invalid_ttl_ms\"}");
app_->set_manual_override(ttl_ms, state);
StaticJsonDocument<192> res;
res["accepted"] = true;
res["expires_in_ms"] = ttl_ms;
String out;
serializeJson(res, out);
send_json_(200, out);
}
void app_http_direct::handle_provision_() {
if (!auth_ok_()) return send_json_(401, "{\"error\":\"unauthorized\"}");
if (server_.arg("plain").length() > 2048) return send_json_(413, "{\"error\":\"payload_too_large\"}");
StaticJsonDocument<768> req;
auto err = deserializeJson(req, server_.arg("plain"));
if (err) return send_json_(400, "{\"error\":\"bad_json\"}");
sys_node_config new_cfg = app_->cfg(); // start from existing
// calibration
new_cfg.soil_raw_wet = req["cal"]["soil_raw_wet"] | new_cfg.soil_raw_wet;
new_cfg.soil_raw_dry = req["cal"]["soil_raw_dry"] | new_cfg.soil_raw_dry;
// irrigation
new_cfg.irr.threshold = req["irrigation"]["threshold"] | new_cfg.irr.threshold;
new_cfg.irr.max_on_ms = req["irrigation"]["max_on_ms"] | new_cfg.irr.max_on_ms;
new_cfg.irr.min_off_ms = req["irrigation"]["min_off_ms"] | new_cfg.irr.min_off_ms;
// wifi (optional)
const char* wmode = req["wifi"]["mode"] | "";
const char* ssid = req["wifi"]["ssid"] | "";
const char* psk = req["wifi"]["psk"] | "";
if (String(wmode) == "sta" && String(ssid).length() > 0) {
strncpy(new_cfg.sta_ssid, ssid, sizeof(new_cfg.sta_ssid)-1);
strncpy(new_cfg.sta_psk, psk, sizeof(new_cfg.sta_psk)-1);
new_cfg.provisioned = true;
} else {
// AP commissioning only
new_cfg.provisioned = true; // provisioned true = config saved, even if AP-only
}
bool ok = app_->apply_and_save_config(new_cfg);
if (!ok) return send_json_(500, "{\"error\":\"save_failed\"}");
send_json_(200, "{\"saved\":true,\"rebooting\":true}");
delay(300);
ESP.restart();
}
void app_http_direct::handle_reset_() {
if (!auth_ok_()) return send_json_(401, "{\"error\":\"unauthorized\"}");
send_json_(200, "{\"ok\":true,\"rebooting\":true}");
delay(300);
ESP.restart();
}
void app_http_direct::handle_log_tail_() {
if (!auth_ok_()) return send_json_(401, "{\"error\":\"unauthorized\"}");
uint16_t lines = 50;
if (server_.hasArg("lines")) lines = (uint16_t)server_.arg("lines").toInt();
String text = SYS_LOG.tail_lines(lines);
StaticJsonDocument<1024> doc;
JsonArray arr = doc.createNestedArray("lines");
// split by '\n' into array, bounded by response size
int start = 0;
while (true) {
int idx = text.indexOf('\n', start);
if (idx < 0) break;
String line = text.substring(start, idx);
if (line.length()) arr.add(line);
start = idx + 1;
if (arr.size() >= lines) break;
}
String out;
serializeJson(doc, out);
if (out.length() > 4096) return send_json_(413, "{\"error\":\"response_too_large\"}");
send_json_(200, out);
}
Dependencies Arduino:
WebServer(builtin ESP32 core)ArduinoJsonOneWire+DallasTemperature
- I) Update
dev-htl-01-node-direct.ino(start WiFi + start HTTP + loop HTTP)
REPLACE file ini menjadi:
#include "app_node_direct.h"
#include "app_http_direct.h"
#include "sys_wifi.h"
#include "sys_log.h"
#include <ESP.h>
app_node_direct g_app;
app_http_direct g_http;
unsigned long last_100ms = 0;
unsigned long last_1s = 0;
unsigned long last_wdt = 0;
static String make_ap_ssid() {
uint32_t id = (uint32_t)ESP.getEfuseMac();
return String("HTL-") + String(id, HEX);
}
void setup() {
Serial.begin(115200);
if (!g_app.init()) {
while (true) delay(1000);
}
// WiFi decision from config
sys_wifi_cfg wcfg;
wcfg.provisioned = g_app.cfg().provisioned;
wcfg.sta_ssid = String(g_app.cfg().sta_ssid);
wcfg.sta_psk = String(g_app.cfg().sta_psk);
const String ap_ssid = make_ap_ssid();
const String ap_psk = ""; // open AP by default (Part 5 may harden)
SYS_WIFI.start(wcfg, ap_ssid, ap_psk, 8000);
auto st = SYS_WIFI.state();
SYS_LOG.add(String("wifi mode=") + st.mode + " ssid=" + st.ssid + " ip=" + st.ip);
g_http.init(&g_app, 80);
}
void loop() {
unsigned long now = millis();
// HTTP pump
g_http.loop();
// control loop
if (now - last_100ms >= 100) {
last_100ms = now;
g_app.loop_100ms();
}
// sensor loop
if (now - last_1s >= 1000) {
last_1s = now;
g_app.loop_1s();
}
// watchdog
if (now - last_wdt >= 1000) {
last_wdt = now;
g_app.watchdog_1s();
}
}
10. Failure Handling Implementation
10.1 Brownout Detection (ESP32)
ESP32 memiliki brownout detector internal.
Tambahkan file:
sys_power.h
sys_power.cpp
sys_power.h
#pragma once
#include <Arduino.h>
class sys_power {
public:
void init();
bool brownout_detected() const;
const char* reset_reason_str() const;
private:
bool brownout_{false};
};
sys_power.cpp
#include "sys_power.h"
#include <esp_system.h>
#include <esp_task_wdt.h>
void sys_power::init() {
esp_reset_reason_t r = esp_reset_reason();
if (r == ESP_RST_BROWNOUT) {
brownout_ = true;
}
}
bool sys_power::brownout_detected() const {
return brownout_;
}
const char* sys_power::reset_reason_str() const {
switch (esp_reset_reason()) {
case ESP_RST_POWERON: return "power_on";
case ESP_RST_BROWNOUT: return "brownout";
case ESP_RST_WDT: return "watchdog";
case ESP_RST_SW: return "software_reset";
default: return "unknown";
}
}
Integrasi ke app_node_direct
Tambahkan member:
#include "sys_power.h"
sys_power power_;
Di init():
power_.init();
if (power_.brownout_detected()) {
SYS_LOG.add("brownout detected");
}
10.2 Actuator Stuck Protection (Runtime Enforcement)
Update srv_irrigation_control.cpp
Tambahkan logic keras:
if (pump_on_ && (now - on_since_) > cfg_.max_on_ms) {
pump_on_ = false;
last_switch_ = now;
return false;
}
Sudah ada, tetapi kita pastikan:
- Tidak boleh melebihi max_on_ms
- Override juga tetap tunduk pada max_on_ms
Tambahkan di bagian override:
if (override_) {
desired = override_->desired(now, desired);
if (override_->active(now) && pump_on_ && (now - on_since_) > cfg_.max_on_ms) {
pump_on_ = false;
}
}
10.3 Sensor Failure Escalation
Update loop_100ms() di app:
if (!sensor_ok_) {
relay_.set(false);
last_reason_ = "sensor_not_ok";
return;
}
10.4 HP Disconnect Handling
Manual override TTL sudah enforced.
Tambahkan auto-cancel logging:
Dalam loop_1s():
static bool last_override = false;
bool now_override = override_.active(sys_time_ms());
if (last_override && !now_override) {
SYS_LOG.add("manual_override_expired");
}
last_override = now_override;
11. Security Implementation
Sekarang kita implementasi serius.
Bukan placeholder.
11.1 PIN Authentication + Session Token
Tambahkan file:
sys_auth.h
sys_auth.cpp
sys_auth.h
#pragma once
#include <Arduino.h>
class sys_auth {
public:
bool init();
bool login(const String& pin, String& out_token);
bool validate(const String& token);
void logout(const String& token);
bool locked() const { return locked_; }
private:
String stored_pin_;
String active_token_;
uint32_t token_expire_{0};
uint8_t fail_count_{0};
bool locked_{false};
};
sys_auth.cpp
#include "sys_auth.h"
#include "sys_time.h"
bool sys_auth::init() {
stored_pin_ = "1234"; // Part 6: move to NVS
return true;
}
bool sys_auth::login(const String& pin, String& out_token) {
if (locked_) return false;
if (pin != stored_pin_) {
fail_count_++;
if (fail_count_ >= 5) {
locked_ = true;
}
return false;
}
fail_count_ = 0;
active_token_ = String(random(100000, 999999));
token_expire_ = sys_time_ms() + 600000; // 10 minutes
out_token = active_token_;
return true;
}
bool sys_auth::validate(const String& token) {
if (locked_) return false;
if (token != active_token_) return false;
if (sys_time_ms() > token_expire_) return false;
return true;
}
void sys_auth::logout(const String& token) {
if (token == active_token_) {
active_token_ = "";
}
}
Integrasi ke HTTP
Di app_http_direct.h
Tambahkan:
#include "sys_auth.h"
sys_auth auth_;
Di init():
auth_.init();
Ganti auth_ok_() menjadi:
bool app_http_direct::auth_ok_() {
if (server_.hasHeader("x-htl-token")) {
return auth_.validate(server_.header("x-htl-token"));
}
return false;
}
Tambahkan endpoint login:
Di init():
server_.on("/login", HTTP_POST, [this]() {
StaticJsonDocument<128> req;
deserializeJson(req, server_.arg("plain"));
String pin = req["pin"] | "";
String token;
if (auth_.login(pin, token)) {
send_json_(200, String("{\"token\":\"") + token + "\"}");
} else {
send_json_(401, "{\"error\":\"auth_failed\"}");
}
});
11.2 AP Hardening
Di setup() ubah AP:
const String ap_psk = "hortilink123"; // minimal WPA2
Open AP tidak diperbolehkan production.
11.3 Rate Limit Login
Sudah ada lockout setelah 5 gagal.
Tambahkan reset lock only after reboot.
11.4 NVS Encrypted PIN (Production)
Replace default PIN:
Dalam sys_auth::init() tambahkan:
// TODO: load PIN from NVS in production
11.5 Unauthorized Attempt Logging
Dalam auth_ok_():
if (!valid) {
SYS_LOG.add("unauthorized attempt");
}
11.6 Secure Reset Handling
Reset hanya jika valid token.
Sudah enforced.
11.7 Tamper Consideration
Tambahkan config flag:
bool config_locked;
Jika locked, provisioning endpoint return 403.
12. Testing Hook (HTL-09 Binding)
Tambahkan di log:
- On login success
- On login fail
- On brownout
- On watchdog reset
- On override expire
QA dapat trigger:
- Brownout (turunkan supply)
- 5x login fail → verify lock
- Override TTL expire
- Sensor unplug → safe mode
13. Definition of Done (Updated)
Node dianggap selesai jika:
- All HTTP endpoints secured by token
- 5x wrong PIN → locked
- Brownout detection logged
- Max_on_ms enforced
- Manual override auto-expire
- 48h soak test stable
- No blocking delay
- All HTL-09 node tests pass
Catatan Penyusunan Artikel ini disusun sebagai materi edukasi dan referensi umum berdasarkan berbagai sumber pustaka, praktik lapangan, serta bantuan alat penulisan. Pembaca disarankan untuk melakukan verifikasi lanjutan dan penyesuaian sesuai dengan kondisi serta kebutuhan masing-masing sistem.